IJPEM
Advantages of Vertical Pelvic Movement in Bipedal Gaits for Increasing Stride Length and Reducing Actuator Power Requirements
휴머노이드 골반의 움직임이 보폭과 에너지 소모에 미치는 영향 분석
박일우/광운대학교
-
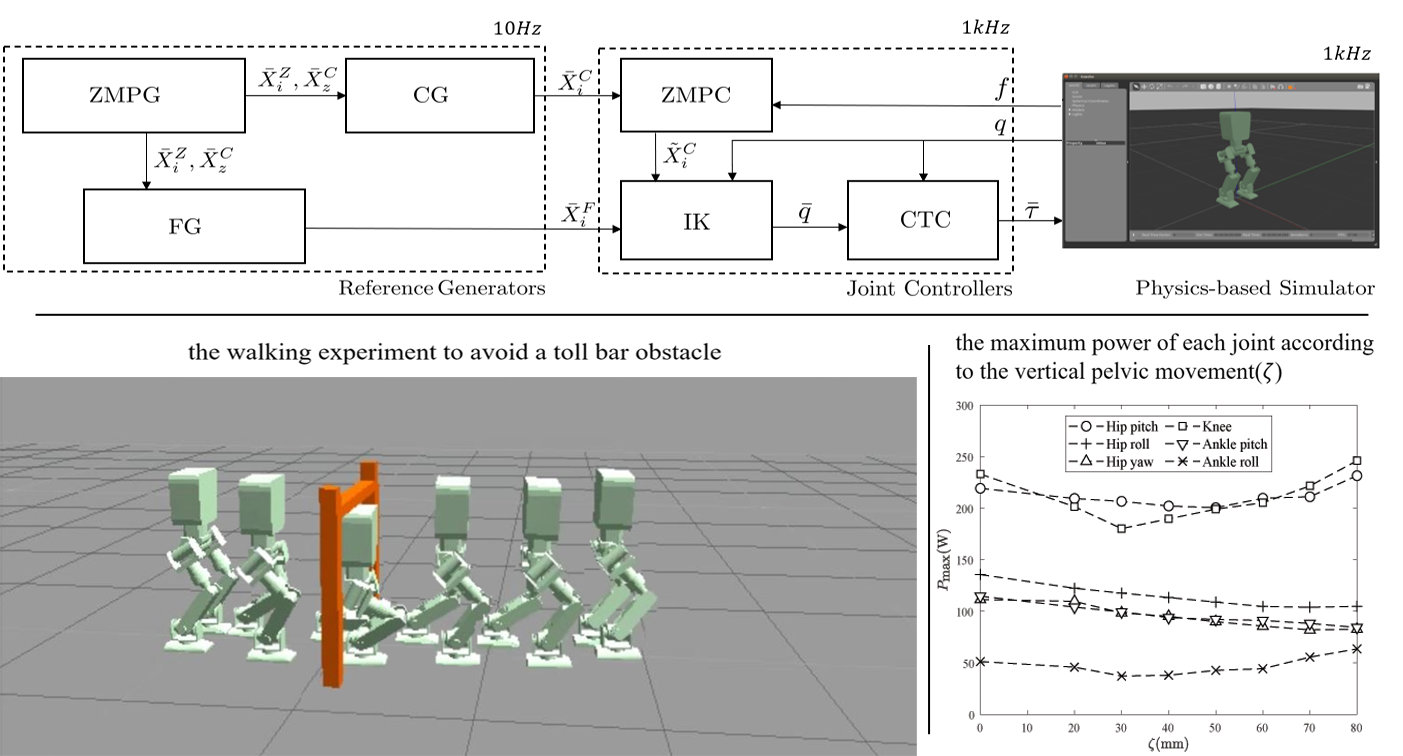
본 연구는 수치 실험을 통해 골반의 수직 움직임이 로봇의 각 조인트에 미치는 영향을 분석하였으며 특히 무릎에 가해지는 부담을 줄일 수 있음을 보임.
-
골반의 수직 움직임을 바꿔가며 수행한 보행 수치실험을 통해 적절한 골반의 수직 움직임이 보폭을 늘리거나 무릎의 액추에이터의 요구 성능을 줄일 수 있음을 보임.
-
골반의 수직 움직임을 고려한 미리보기 제어(preview control)를 사용하면 골반의 수직 움직임이 큰 보행에서도 안정적으로 보행할 수 있음을 확인함.
-
Toll bar 장애물을 피하는 경우와 같이 골반의 수직 움직임이 크게 필요할 경우 제안하는 제어기를 사용하면 안정적으로 회피하며 보행할 수 있음을 확인함.